嫦娥四号是怎么落月的?

 公家号haibaraemily_planets
公家号haibaraemily_planets
本年 4 月,以色列首个探月使命——创宿世纪号在当作功绕月之后,于动力下降阶段不幸着陆掉败,坠毁在月球概况。
9 月初,印度的第二个探月使命,也是印度首个月球着陆使命——月船二号着陆器在动力下降至距离月表 2.1 公里后不久掉去联系,最终软着陆掉败,也坠毁在月球概况。
从环抱到着陆,这“再接近一点点”的十几或者几十公里距离里,无数探测器折戟于此。
着陆到底有多灾?
领会了这点,才能真正体味到,我国嫦娥三号、四号当作功落月有何等了不得。
就在前几天,《天然·通信》杂志在线颁发了以中国科学院国度天文台、中国科学院大学为首的刘建军等科学家们对嫦娥四号落月过程的重建成果[1],经由过程下降相机拍摄的影像回溯嫦娥四号的落月之路。
嫦娥四号着陆器底部安装了一台下降相机(LCAM),跟着嫦娥四号在下降过程中不竭接近月球概况,下降相机也在不竭摄影——按照照片图幅的巨细、角度转变和拍摄到的特征地貌,再与已有的月球地图做对比和匹配,就可以反推嫦娥四号在下降过程中各个阶段的位置和角度,也可以大致猜测着陆点地点的位置了。
嫦娥四号的打算下降策略
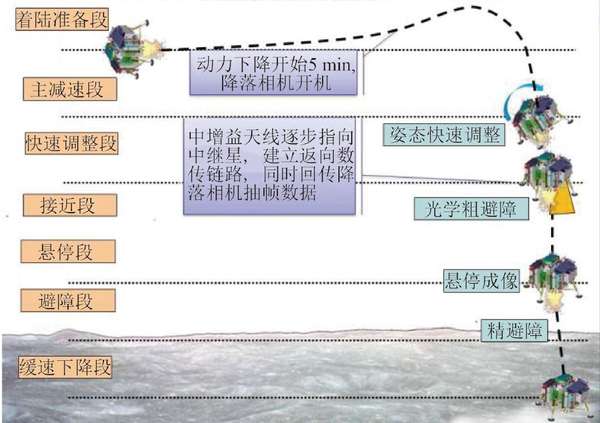
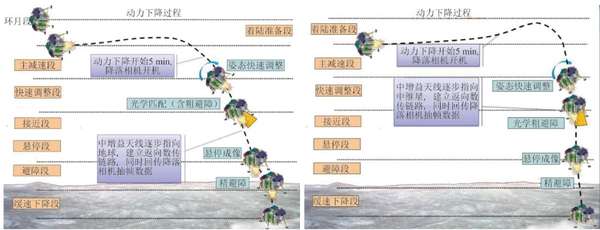
和嫦娥三号一样,自立着陆的嫦娥四号整个动力下降过程也分为 6 个阶段:本家儿减速段、快速调整段、接近段、悬停段、避障段缓和速下降段。也和嫦娥三号一样,嫦娥四号继续利用 7500N 变推力策动机来完当作动力下降阶段的减速和航迹调整。
嫦娥四号的动力下降过程▼
然而,固然同样是要着陆在月球概况,下降过程中在月面上的航迹也都是 450 公里摆布,但因为目标地的地形差别,嫦娥三号和嫦娥四号采纳的下降策略就大大分歧了。
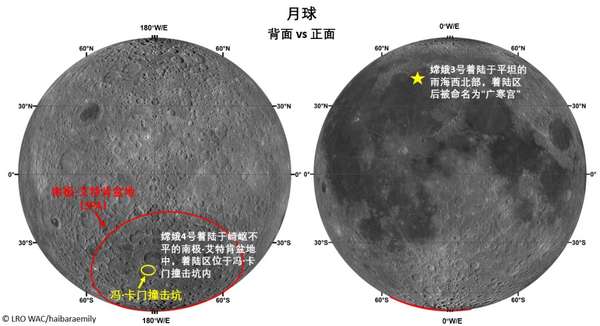
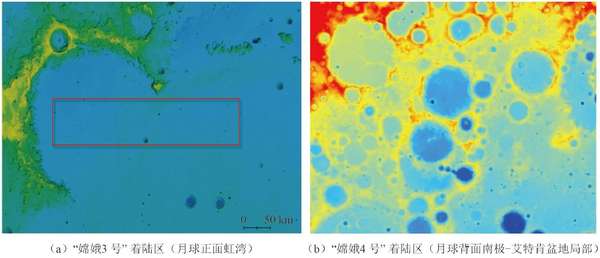
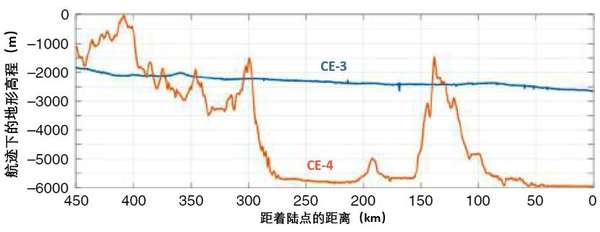
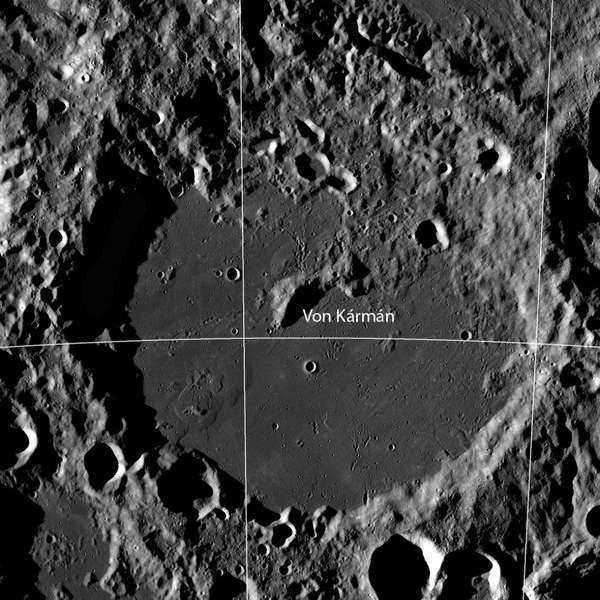
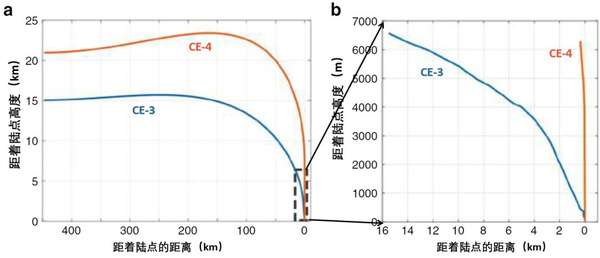
嫦娥三号的着陆区是月球正面平展的雨国内部,整个下降航迹下的地形升沉不跨越 800 米,而嫦娥四号的打算着陆区固然自己是位于相对平展的冯·卡门撞击坑内部,但冯·卡门撞击坑整体是位于月球后背高卑的南极 - 艾特肯盆地内部的,整个下降航迹下的地形升沉高达 6 公里[4]。
嫦娥三号着陆区地形升沉 vs 嫦娥四号着陆区地形升沉▼
这意味着嫦娥四号可选择的着陆规模更小,并且它必需落得很是准——一旦偏了一点,就可能落不进平展的预心猿意马着陆区里,而是撞上高卑的高山低谷了。
嫦娥四号:我太难了!

是以,分歧于嫦娥三号的抛物轨迹下降策略,嫦娥四号选择进一步减小着陆位置的不确定性,从本家儿减速段竣事后就由斜标的目的前活动轨迹改为近乎垂直下降轨迹,然后从接近段起头辅以程度偏向的微调来越过危险的地形(避障),测距敏感器的引入机会也做了响应调整[3]。
嫦娥四号的现实下降轨迹
那嫦娥四号是不是按照预心猿意马的打算着陆的呢?
下降相机告诉我们:是的!
2019 年 1 月 3 日 10 时 15 分,跟着海说神聊京航天飞翔节制中间发出指令,嫦娥四号探测器从距离月面15 公里处起头实施动力下降,7500N 变推力策动机开机,慢慢将探测器的速度从相对月面 1.7 公里 / 秒降到 0。约 690 秒后,嫦娥四号探测器自立着陆在月球后背冯·卡门撞击坑内的一片平展区域。[7]
下降相机在整个动力下降阶段拍摄的视频清晰地表白,嫦娥四号完美执行了预心猿意马的着陆策略。
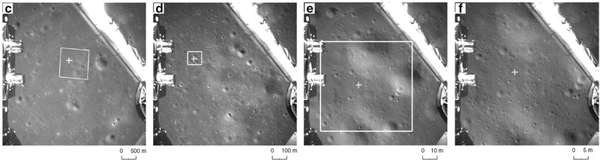
在距离月面约 8-6 公里处,嫦娥四号进行快速姿态调整,从“侧身”转为“垂直”接近月面。经由过程下降相机拍摄的照片连系已有的嫦娥二号月面地图(摄影当作像几何干系 + 月面和影像中的不异地貌点匹配)进行反推,刘建军及其同事们切确重建了嫦娥四号从 5635 米高度(图中以 O 点代表)以下的下降轨迹▼
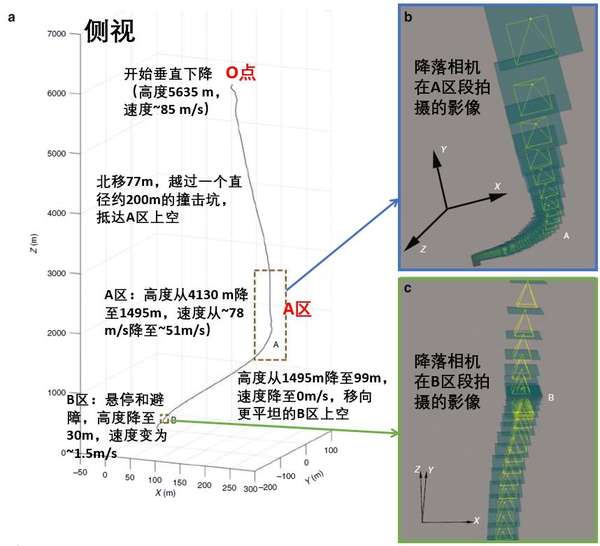
在接近段中,嫦娥四号以近乎垂直的角度下降并不竭减速,这一阶段还要完当作粗避障的使命,也就是要越过一些较大的障碍物,包管着陆器来到一片大体平展的区域上空悬停,现实下降过程中,嫦娥四号在距月面 99 米处的 B 区起头悬停。
在悬停和避障段,嫦娥四号需要对此时的脚下的月面进行进一步勘查,对月面的坡度和小型障碍物进行进一步邃密识别和自立避障(精避障),直至选心猿意马相对平展的平安着陆区域后,才起头最后的缓速垂直下降。
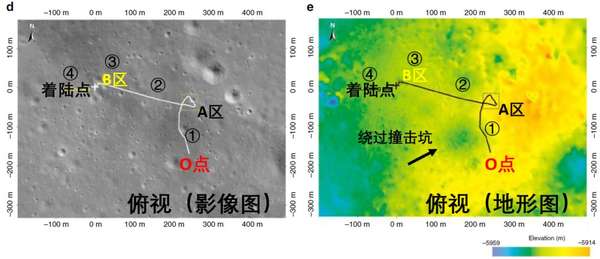
① 从 O 点海说神聊移约 77 米,越过直径约 200 米的撞击坑抵达 A 区 → ②从 A 区到 B 区:标的目的西海说神聊移动 244 米 → ③ B 区:悬停约 13 秒 ,标的目的西南移动 12 米以越过一个直径约 25 米的撞击坑,抵达着陆点上空 → ④ 垂直迟缓下降,直至软着陆。改编自:参考文献[1]
嫦娥四号的现实下降轨迹也清晰揭示了嫦娥三号和四号下降策略的差别,和打算一样一样的▼
来重温一下嫦娥三号和嫦娥四号下降过程的差别吧▼
注重嫦娥三号在 3-2.4 公里高度进行快速姿态调整(也就是转标的目的),而嫦娥四号则在 8-6 公里高度处就已经开展了快速姿态调整。PS:视频时长分歧,这里调当作了快速调整段同时转标的目的,所以嫦娥四号的视频晚起头了 30 秒。来历:航天科技集团
嫦娥四号的切确着陆点
经由过程下降相机拍摄的距离月面越来越近的影像,对比已有的月面地图,我们可以一点一点缩小嫦娥四号最终着陆点的规模。
从嫦娥四号着陆起头,浩繁科学家们就在为确定着陆点位置而尽力。
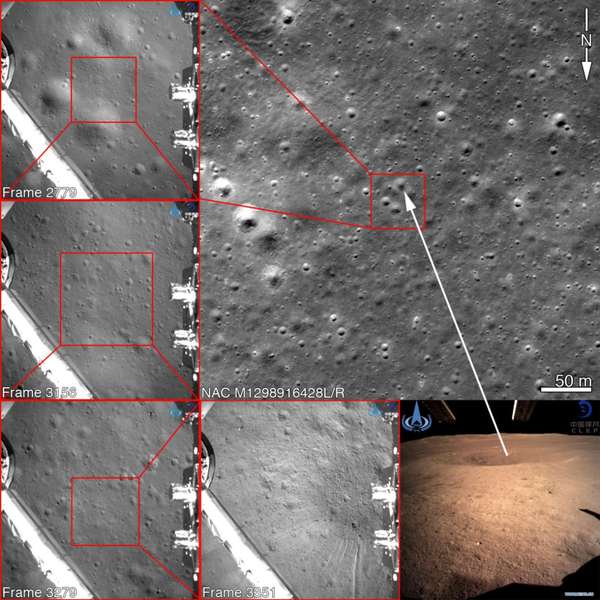
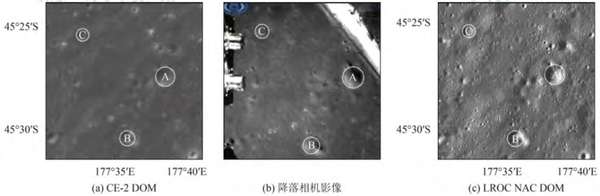
2019 年 1 月 3 日,嫦娥四号顺遂着陆当天,NASA 月球勘测轨道飞翔器 LROC 相机团队就按照我国探月工程发布的下降相机影像(小图)中的几个较着的撞击坑和已有的 LROC NAC 影像(布景大图)做了匹配,嫦娥四号最终着陆点就位于这四个撞击坑之内[8]。
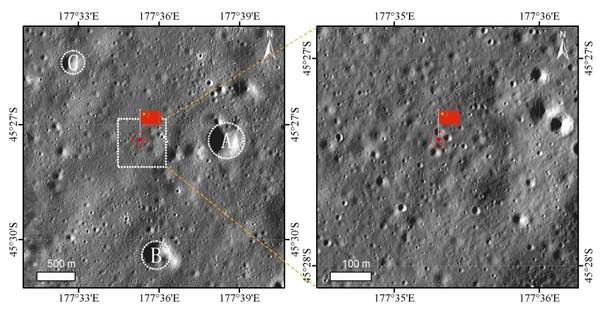
1 月 11 日,LROC 相机团队又按照探月工程发布的下降相机拍摄的视频,进一步在 LROC NAC 影像中圈心猿意马了最终着陆区域(下中图),还找到了嫦娥四号监督相机拍摄的玉兔二号前方的撞击坑是哪一个坑[6]。
而在此几天前,中科院遥感所邸凯昌及其同事们就已经借助嫦娥二号正射影像 DOM、LROC NAC 影像、嫦娥四号下降相机影像、嫦娥四号监督相机影像等多源数据,操纵影像特征匹配定位和单像视觉测量定位手艺,确定了嫦娥四号着陆点在 LROC 参考系下的切确位置为 177.588°E, 45.457°S[7,8]。
找到下降相机影像中最较着的 ABC 三个撞击坑在已有月面地图中的位置▼
连系监督相机拍摄的影像,可以进一步圈心猿意马切确着陆点▼
确定着陆点切确位置的意义并不仅仅在于给着陆点确定了一个坐标,更是对指导玉兔二号的路径规划和阐发嫦娥四号获取的科学数据有很大帮忙。
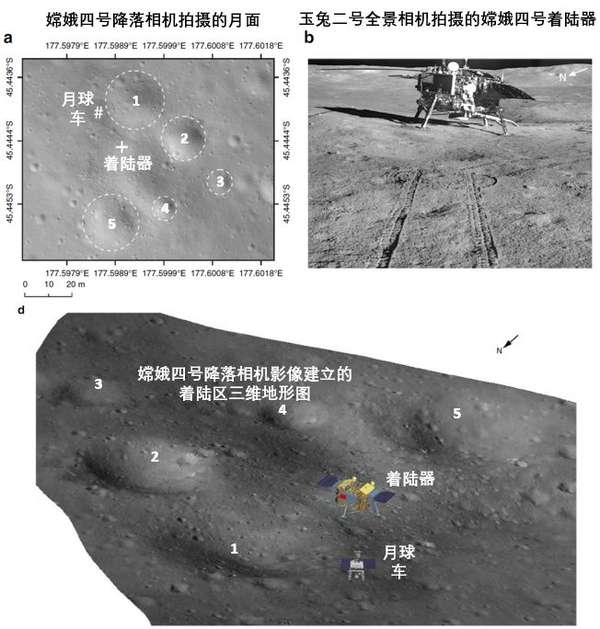
在此根本上,海说神聊京航天飞翔节制中间对玉兔二号前 3 个月昼的路径进行了规划(绿色点),黄线是玉兔二号的现实行进轨迹▼

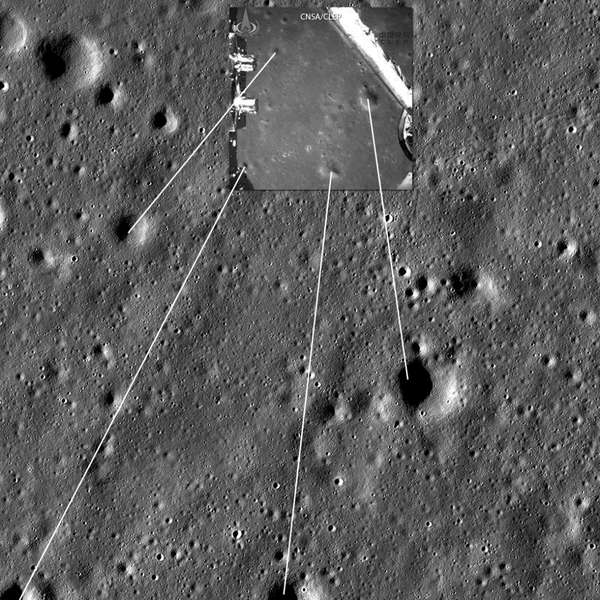
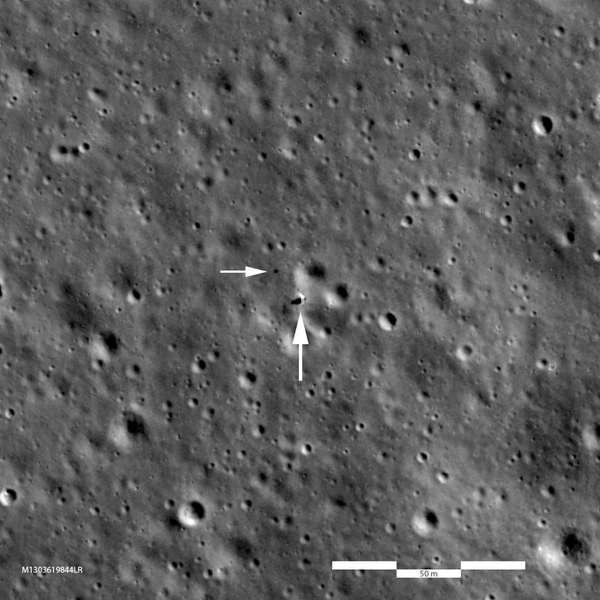
2 月,LRO 探测器起头陆续拍摄到多张嫦娥四号着陆器和玉兔二号月球车在月面的照片,进一步确定了探测器在 LROC 坐标系统下的地舆位置(初步推算着陆点坐标为 45.457°S, 177.589°E)▼
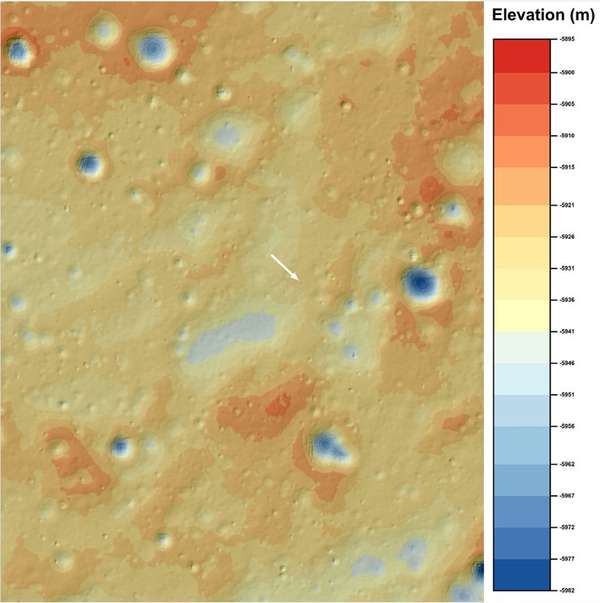
4 月底,LROC 团队发布了操纵 2 月 LRO NAC 拍摄的影像对成立的嫦娥四号着陆区地形数字高程模子(DEM),切确确定嫦娥四号着陆点在 LROC 参考系统下的坐标为 45.4561°S, 177.5885°E,高程 -5927 米▼
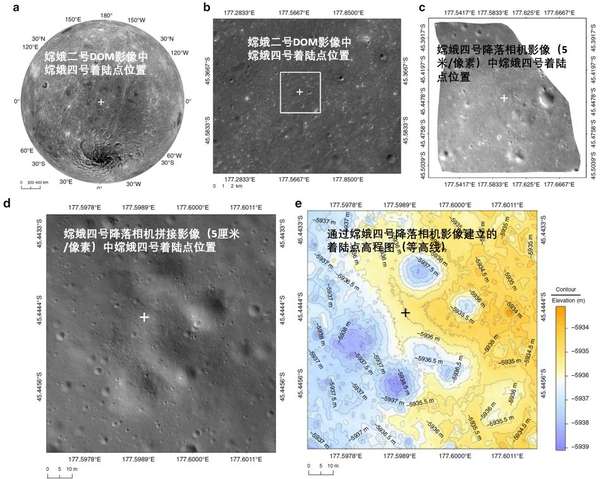
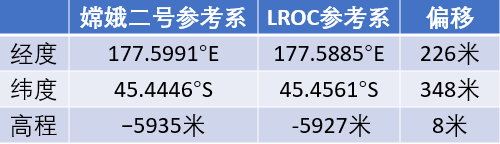
而本次刘建军及其同事们则经由过程嫦娥二号的正射影像(DOM)、嫦娥四号下降相机在 5635 米高度下拍摄的 180 张分歧距离和角度的月面影像(1 张 / 秒)、嫦娥二号地形数字高程模子 DEM (CE2TMAP2015)、玉兔二号的两个导航相机获取的立体影像等综合数据,进一步确定了嫦娥四号着陆器在嫦娥二号影像参考系统下的切确坐标为 177.5991°E,45.4446°S,高程−5935 米。
嫦娥四号着陆点(+ 号)在分歧来历、分歧分辩率的影像中的位置和四周地形▼
这一成果还可以经由过程玉兔二号顶部的两个全景相机(PCAM)拍摄的影像来互为验证。
玉兔二号拍摄的影像中显示,嫦娥四号着陆于一个已退化的撞击坑的缓坡上,海说神聊部 8.35 米外就是一个直径 25 米的撞击坑的边缘。着陆区被五个直径 10.21~25 米,深度 1.21~3.03 米的撞击坑所环抱。
基于嫦娥二号参考系统的位置与基于 LROC 参考系统下的位置合适得很好,但也不是百分百吻合:两者在纬度上有 226 米的误差,经度上有 348 米的误差,总位置有 415 米的误差。
这一点点偏移长短常正常的,表现了月背两套影像数据自己的细小偏移。探测器各自的轨道测量误差、月背的重力场转变、相机摄影的细小形变等良多原因都可能会对最后的定位成果发生细小的影响,而在月球后背成立绝对节制点可以有用消弭这种偏移。
结语
嫦娥四号着陆器和玉兔二号月球车至今状况杰出,还在继续它们的月背探险之旅。就在几天前,9 月 23 日 20 时 26 分和 22 日 20 时 30 分,着陆器和月球车接踵受光照当作功自立“叫醒”,起头了第 10 个月昼的探测工作[11]。

而科学家们对嫦娥四号获取的科学数据的阐发息争译工作也还在继续。等候嫦娥四号的测月雷达、低频射电频谱仪、月表中子及辐射剂量探测器、中性原子探测器等仪器的科学当作果也早日和大师碰头吧~
拓展阅读参考
[1] Liu, J., Ren, X., Yan, W., et al. (2019). Descent trajectory reconstruction and landing site positioning of Chang’E-4 on the lunar farside. Nature Communications.
[2]
[3] 李飞,张熇,吴学英,等. 月球后背地形对软着陆探测的影响阐发[J]. 深空探测学报,2017,4(2):143-149.
[4] 嫦娥四号探测器当作功着陆月球后背 传回宿世界第一张近距离拍摄月背影像图
[5] LROC | 2019.01.03 On the Farside!
[6] LROC | 2019.01.11 Chang'e 4 Lander Coordinates
[7] 海说神聊京航天飞控中间就嫦娥四号使命圆满当作功 标的目的空天信息研究院发来感激信嫦娥 4 着陆器定位.html
[8] 邸凯昌,刘召芹,刘斌,万文辉,彭嫚,王晔昕,芶盛,岳宗玉,辛鑫,贾萌娜,牛胜利,2019. 多源数据的嫦娥四号着陆点定位. 遥感学报, 23(1):177-184, DOI:10.11834/jrs.20199015
[9] LROC | 2019.02.15 Above the Landing Site
[10] LROC | 2019.04.30 Topographic Map of the Chang'e 4 Site
[11] 中国探月工程 - 嫦娥四号着陆器和“玉兔二号”巡视器完当作自立叫醒,起头第十月昼工作
- 发表于 2019-09-27 23:17
- 阅读 ( 1396 )
- 分类:其他类型
0 篇文章
作家榜 »
-
 xiaonan123
189 文章
xiaonan123
189 文章
-
 汤依妹儿
97 文章
汤依妹儿
97 文章
-
 luogf229
46 文章
luogf229
46 文章
-
 jy02406749
45 文章
jy02406749
45 文章
-
 小凡
34 文章
小凡
34 文章
-
 Daisy萌
32 文章
Daisy萌
32 文章
-
 我的QQ3117863681
24 文章
我的QQ3117863681
24 文章
-
 华志健
23 文章
华志健
23 文章