如何设置碰撞检测
要设置碰撞检测,定义碰撞(挑选)传感器,当它们与周围目标场景对象发生碰撞时进行检测。虚拟世界的传感器类似于真实世界的传感器,如超声波、激光雷达和触摸传感器。Simulink 3D动画传感器基于X3D传感器(也支持VRML),如X3D拾取组件规范中所述。
东西/原料
- MATLAB
- 电脑
方式/步调
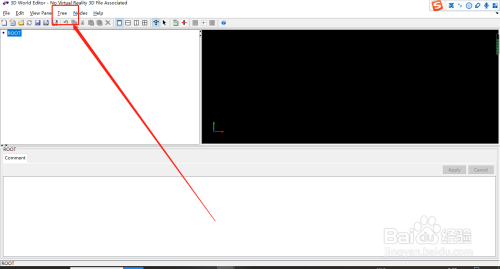
- 1
在“3D宿世界编纂器树布局”窗格中,选摘要标的目的其添加拾取传感器的转换节点的子节点。
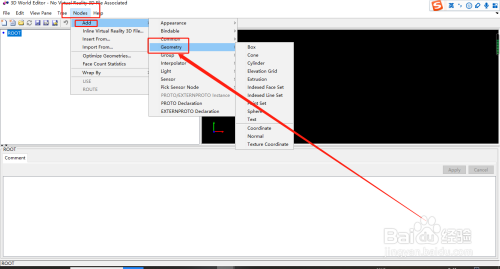
- 2
要建立与传感器一路利用的拾取几何图形,请添加一个几何图形节点。选择节点(Nodes)>添加(Add)>几何图形(Geometry),并选择适合于传感器类型的几何图形(例如,点集(Point Set))。
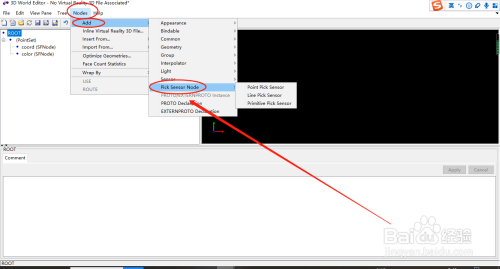
- 3
经由过程选择节点添加一个拾取传感器节点(Nodes)>添加(Add)>拾取传感器节点(Pick Sensor Node)。
- 4
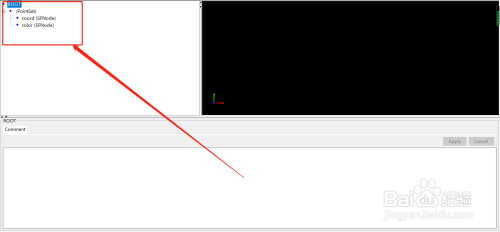
在传感器节点中,右键单击拾取几何属性并选择USE。指定为传感器建立的几何节点。
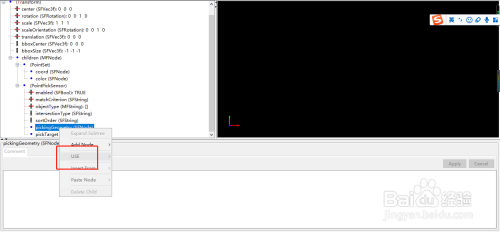
- 5
同样在传感器节点中,右键单击拾取方针属性并选择USE。指定要让传感器检测冲突的方针对象。
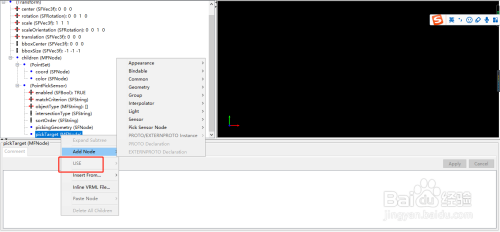 END
END
- 发表于 2020-05-06 17:01
- 阅读 ( 1131 )
- 分类:其他类型
admin
0 篇文章
作家榜 »
-
 xiaonan123
189 文章
xiaonan123
189 文章
-
 汤依妹儿
97 文章
汤依妹儿
97 文章
-
 luogf229
46 文章
luogf229
46 文章
-
 jy02406749
45 文章
jy02406749
45 文章
-
 小凡
34 文章
小凡
34 文章
-
 Daisy萌
32 文章
Daisy萌
32 文章
-
 我的QQ3117863681
24 文章
我的QQ3117863681
24 文章
-
 华志健
23 文章
华志健
23 文章