如何转换PGM图像到地图
手把手教学。将包含ROS映射的可移植灰度图(.pgm)文件转换为在MATLAB中使用的占用网格图。
东西/原料
- matlab
- 电脑
方式/步调
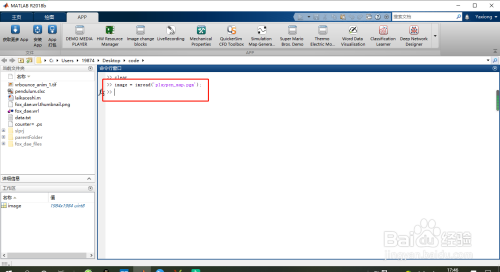
- 1
%利用imread导入图像。
号令行键入:
image = imread('playpen_map.pgm');
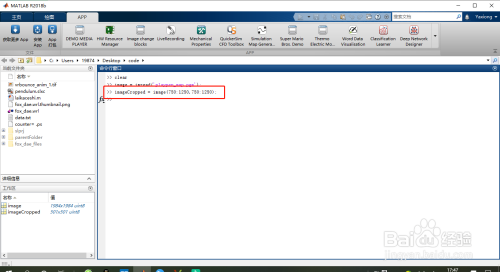
- 2
%裁剪图像到相关区域。
号令行键入:
imageCropped = image(750:1250,750:1250);
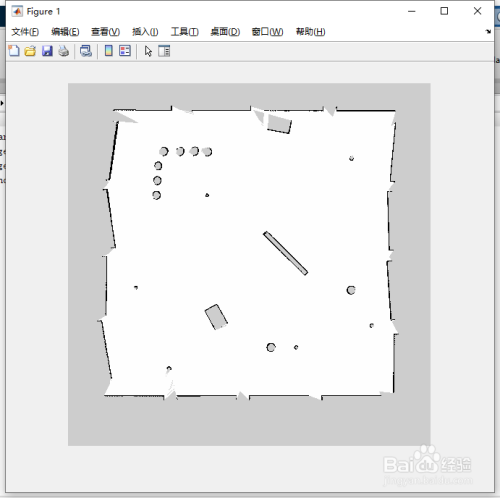
- 3
%显示图像。
号令行键入:
imshow(imageCropped)
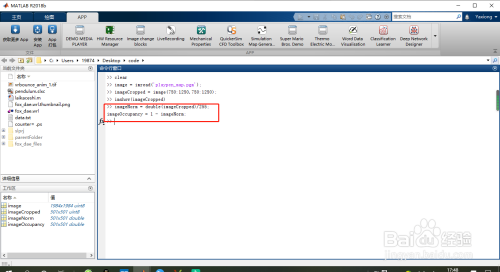
- 4
%PGM值从0到255暗示为uint8。经由过程将裁剪后的图像转换为两倍并将每个单位格除以255来对这些值进行规范化。此图像显示了接近0的obstaclesas值。从1减去规范化的图像,获得占用值1暗示占用空间。
号令行键入:
imageNorm = double(imageCropped)/255;
imageOccupancy = 1 - imageNorm;
- 5
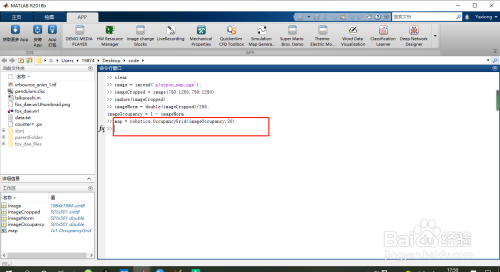
%利用调整后的地图图像建立占用网格对象。导入的mapresolution是每米20个单位。
号令行键入:
map = robotics.OccupancyGrid(imageOccupancy,20);
- 6
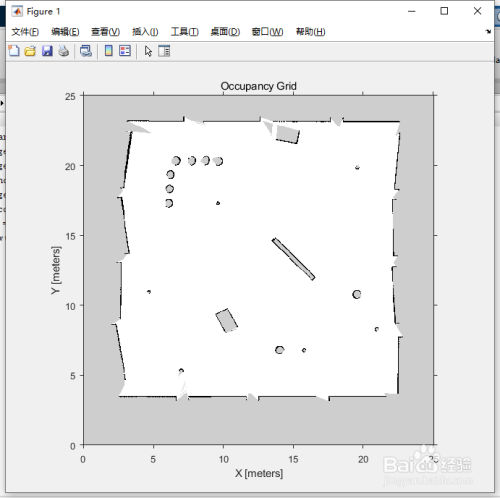
%显示图像。
号令行键入:
show(map)
 END
END
- 发表于 2020-05-21 22:28
- 阅读 ( 1496 )
- 分类:其他类型
admin
0 篇文章
作家榜 »
-
 xiaonan123
189 文章
xiaonan123
189 文章
-
 汤依妹儿
97 文章
汤依妹儿
97 文章
-
 luogf229
46 文章
luogf229
46 文章
-
 jy02406749
45 文章
jy02406749
45 文章
-
 小凡
34 文章
小凡
34 文章
-
 Daisy萌
32 文章
Daisy萌
32 文章
-
 我的QQ3117863681
24 文章
我的QQ3117863681
24 文章
-
 华志健
23 文章
华志健
23 文章